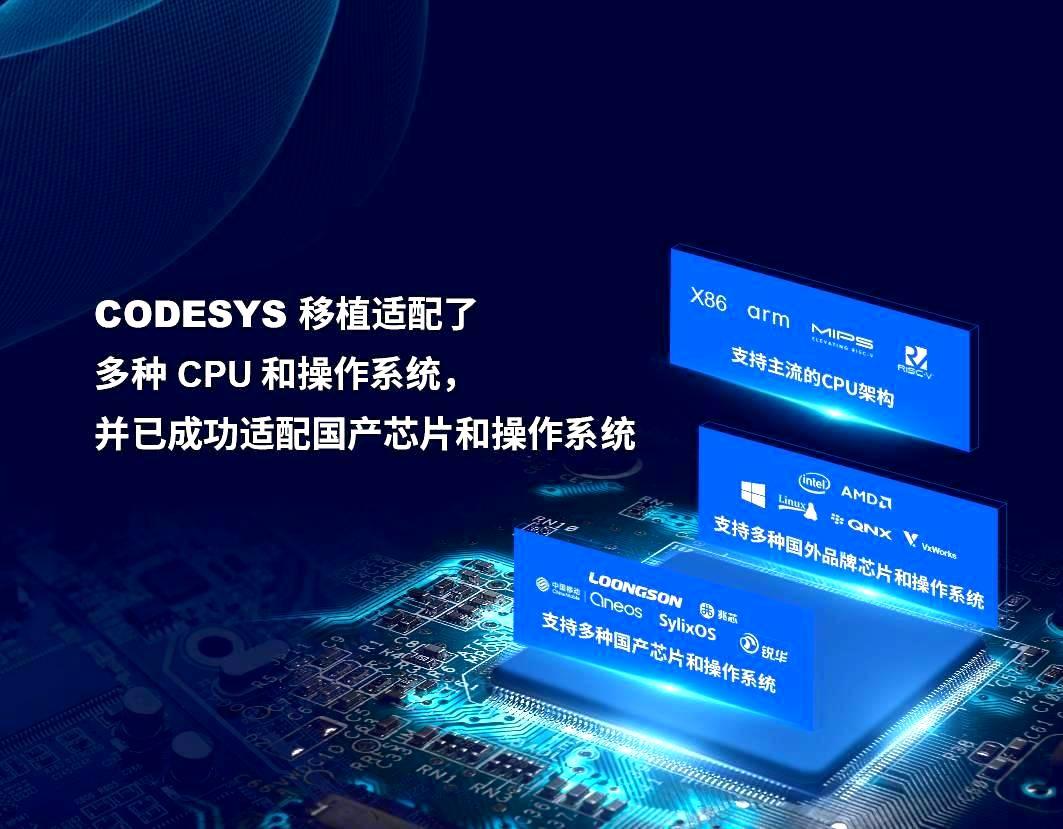
√ 使用英特尔Core i5系列x86高性能处理器,独立于计算机控制 √ 基于LinuxRT+CoDeSys软件平台开发 √ 支持PLCopen规范的6种语言编程 √ 系统软件包含CoDeSys的PLCopen+CAM+CNC+ROBOT运动控制组件 √ 控制器采用基于EtherCAT总线的运动控制,可接入最多256轴的多轴控制系统 √ 采用基于EtherCAT总线IO扩展,可以接入高速IO扩展、普通DI/DO扩展,最多可达32000点 √ 配置多个LAN网接口,支持EtherNet/IP、OPC/UA、ModbusTCP等多种通信协议,方便组成不同实时性的通讯网络 √ 内置有ModbusRTU主站/从站协议,2个独立的通信接口RS485、RS23,方便与传统设备配合运行 √ 根据用户需求,可加载TargetView可视化组件





















 全国免费服务热线
全国免费服务热线  社区:
社区: